ROS based simulation tool for serial robots
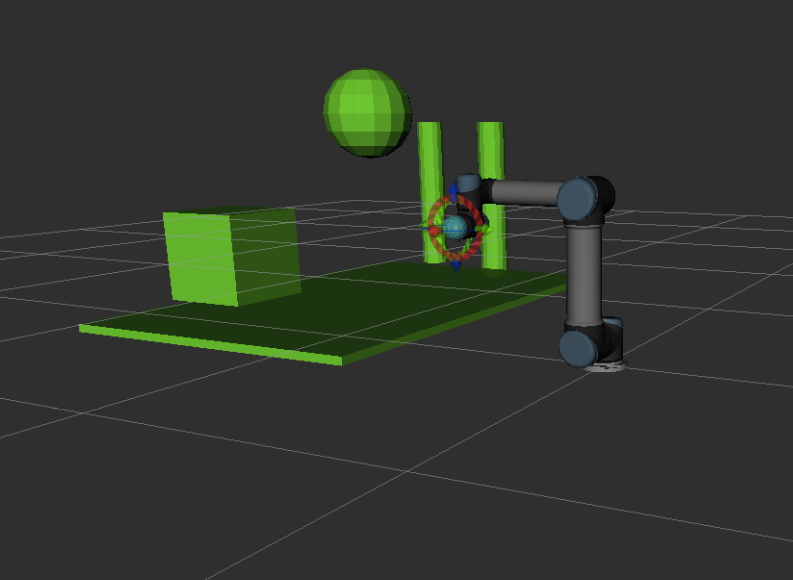
A ROS based software for simulation and manipulation of 6 DOF robots was developed and integrated. It's a generic simulation tool for robotic manipulation which features Inverse kinematics solutions, path planning, adding collision objects and collision avoidance. This tool will come in handy for doctors in surgical environments where they can pre visualize the overall workflow of the robot’s movement and its path. The system is designed in a more dynamic way, where the user can choose different functionalities as per their need. (Example : User can explicitly mention about the path in which the robot has to move with defined constraints and orientation). The prototype was developed using the Universal Robot 5e, which can be later integrated to other commercial robots.